LRO에서 넘어왔습니다.
달 정찰 인공위성
덤프버전 :
Lunar Reconnaissance Orbiter, LRO


달의 궤도를 도는 NASA의 인공위성. 고다드 우주비행센터에서 개발되었고, 2009년 6월 18일 케이프 커내버럴 우주군 기지의 SLC-41에서 아틀라스 V 401에 실려 발사되었다.
발사 당시 뒷이야기가 있는데, 우주왕복선 미션인 STS-127 엔데버와 발사 날짜가 하루 간격으로 겹치면서[1] 로켓 추적팀이 힘들다고 난데없이 LRO의 발사가 미뤄질 뻔 했다. 다행히 STS-127이 또(...) 취소되고 취소되길 반복한 끝에 6차인 7월 15일(...)에야 출발[2] 하면서 6월 18일 발사는 정상적으로 이뤄졌다.
아르테미스 계획의 일환으로, 루나 게이트웨이 예정궤도 검증을 위한 캡스톤(CAPSTONE) 위성의 자동 궤도진입을 보조할 예정이다.
어차피 음모론자들은 이것도 조작이라며 우긴다.

LADEE를 9km 거리에서 촬영하였다.
 이 문서의 내용 중 전체 또는 일부는 2023-11-21 11:22:51에 나무위키 달 정찰 인공위성 문서에서 가져왔습니다.
이 문서의 내용 중 전체 또는 일부는 2023-11-21 11:22:51에 나무위키 달 정찰 인공위성 문서에서 가져왔습니다.

LRO은(는) 여기로 연결됩니다.
left-to-right override (U+202D)에 대한 내용은 RLO 문서 참고하십시오.1. 개요[편집]
달의 궤도를 도는 NASA의 인공위성. 고다드 우주비행센터에서 개발되었고, 2009년 6월 18일 케이프 커내버럴 우주군 기지의 SLC-41에서 아틀라스 V 401에 실려 발사되었다.
발사 당시 뒷이야기가 있는데, 우주왕복선 미션인 STS-127 엔데버와 발사 날짜가 하루 간격으로 겹치면서[1] 로켓 추적팀이 힘들다고 난데없이 LRO의 발사가 미뤄질 뻔 했다. 다행히 STS-127이 또(...) 취소되고 취소되길 반복한 끝에 6차인 7월 15일(...)에야 출발[2] 하면서 6월 18일 발사는 정상적으로 이뤄졌다.
아르테미스 계획의 일환으로, 루나 게이트웨이 예정궤도 검증을 위한 캡스톤(CAPSTONE) 위성의 자동 궤도진입을 보조할 예정이다.
2. 목적[편집]
- 미래의 달에 대한 유인 및 무인 임무를 계획
- 안전한 착륙지점 확인: 특성 파악을 돕기 위해 최대 해상도 50 cm / pixel (20 in / pixel)의 고해상도 매핑을 제공한다.
- 달의 잠재적 자원파악
- 방사선 환경의 현상 규명
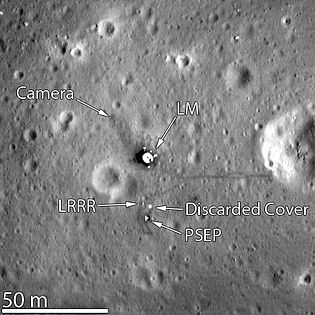
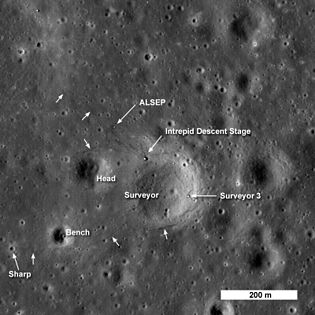
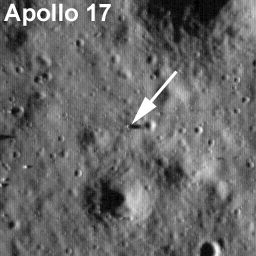
3. 아폴로 계획 착륙지 사진[편집]
위의 사진들은 아폴로 계획 음모론을 반박하는 중요한 증거가 된다.



4. 기타[편집]
LADEE를 9km 거리에서 촬영하였다.
 이 문서의 내용 중 전체 또는 일부는 2023-11-21 11:22:51에 나무위키 달 정찰 인공위성 문서에서 가져왔습니다.
이 문서의 내용 중 전체 또는 일부는 2023-11-21 11:22:51에 나무위키 달 정찰 인공위성 문서에서 가져왔습니다.[1] 이 미션은 ISS 키보 모듈을 완성하는 미션이었으나 6월 13일 발사가 취소되고 다시 잡은 날짜가 하필 6월 17일이었다.[2] 심지어 이 6차 발사에서도 STS-107 때마냥 탱크 조각이 또 오비터의 날개를 때렸지만 다행히도 방열 타일에 큰 손상이 발생하진 않았고 귀환도 정상적으로 이뤄졌다.